Loading...
gazebo中添加gps模块 首先,需下载一个功能包hector gazebo plugins。Hect...
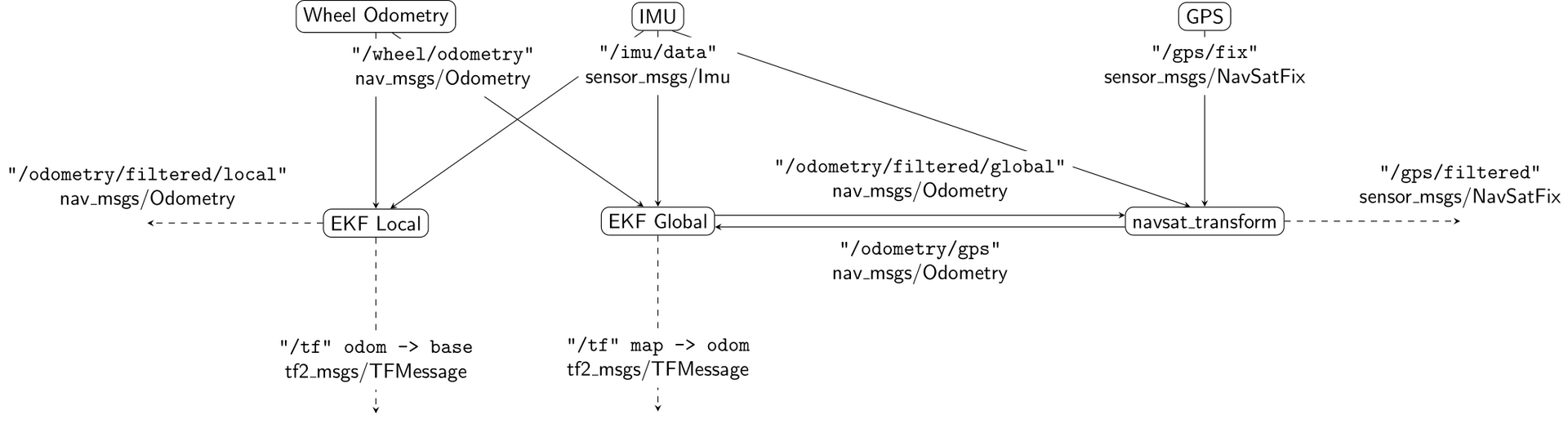
State Estimation Nodes ekf_localization_node ekf_loc...
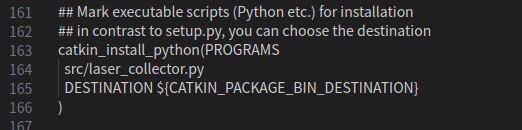
雷达点云数据保存为mat格式 创建功能包 在终端中执行以下命令以创建一个新的ROS功能包: catkin...