Loading...
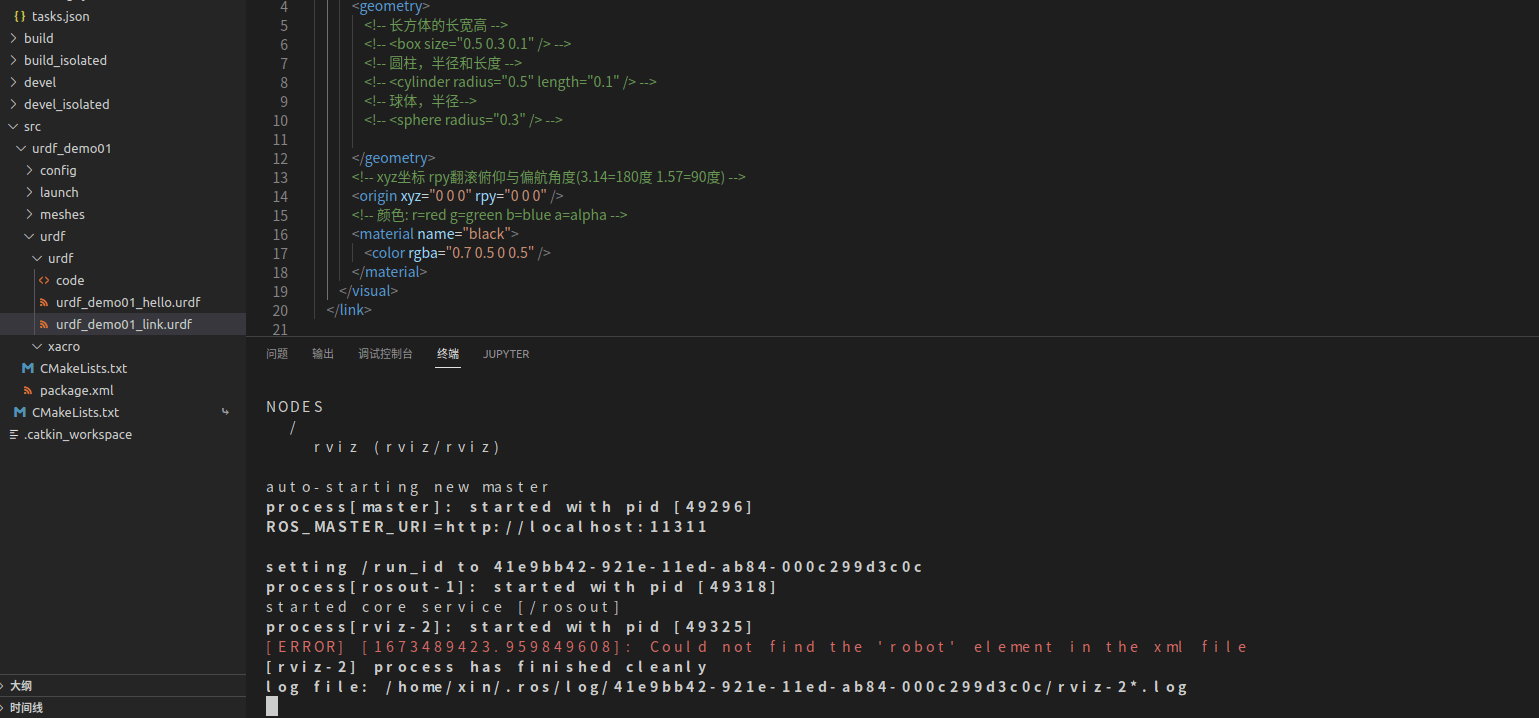
报错1 报错原因 缺失robot标签 解决方法 添加robot标签 报错2 报错原因 ge...
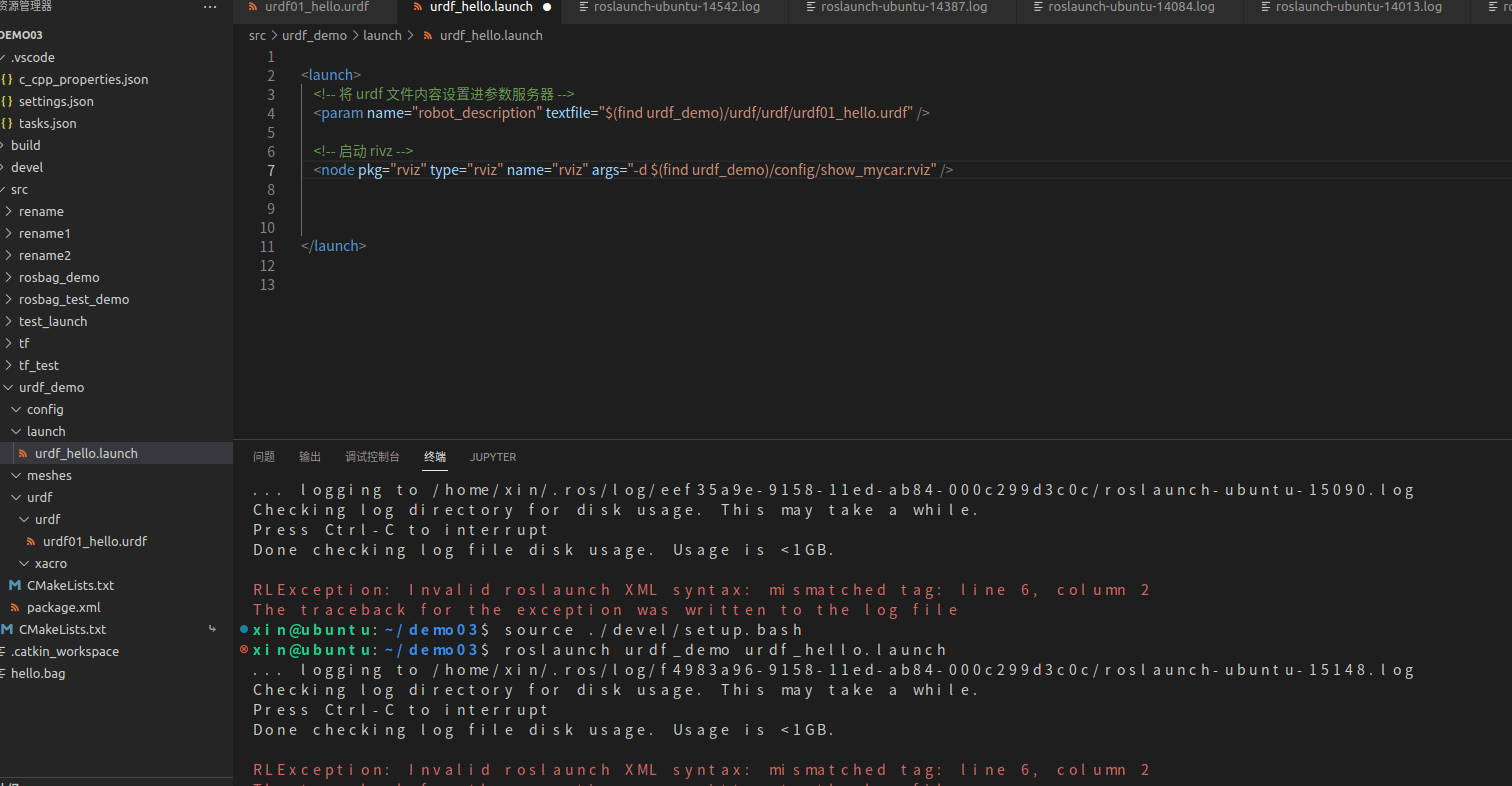
存在报错 在launch文件的某行某列存在不匹配的标签 解决办法 修改后保存,**一定要保存!!...