Loading...
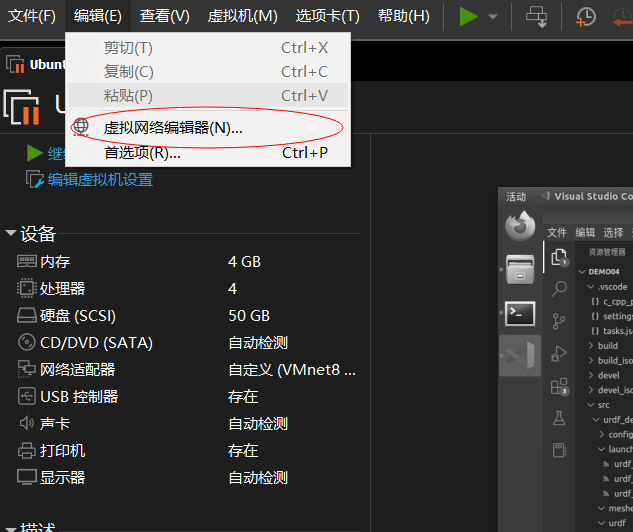
关闭所有虚拟机 在VMware主页面找到编辑-->虚拟网络编辑器 在虚拟网络编辑器中找到更...
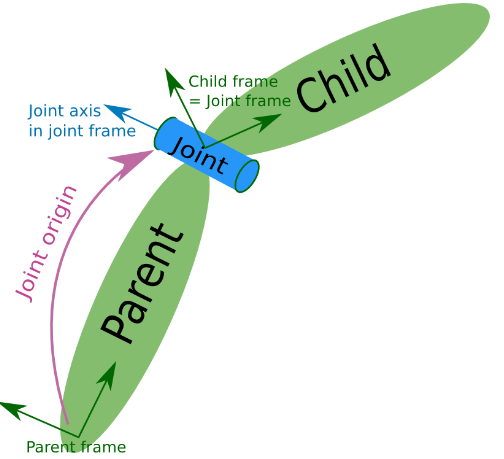
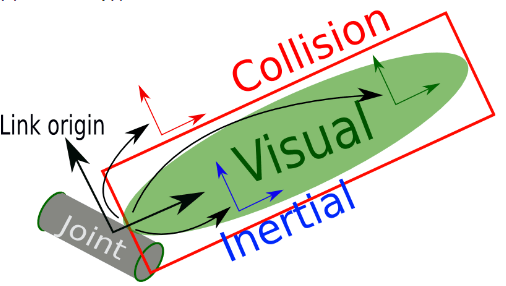
简介 urdf 中的 link 标签用于描述机器人某个部件(也即刚体部分)的外观和物理属性,比如: 机器...
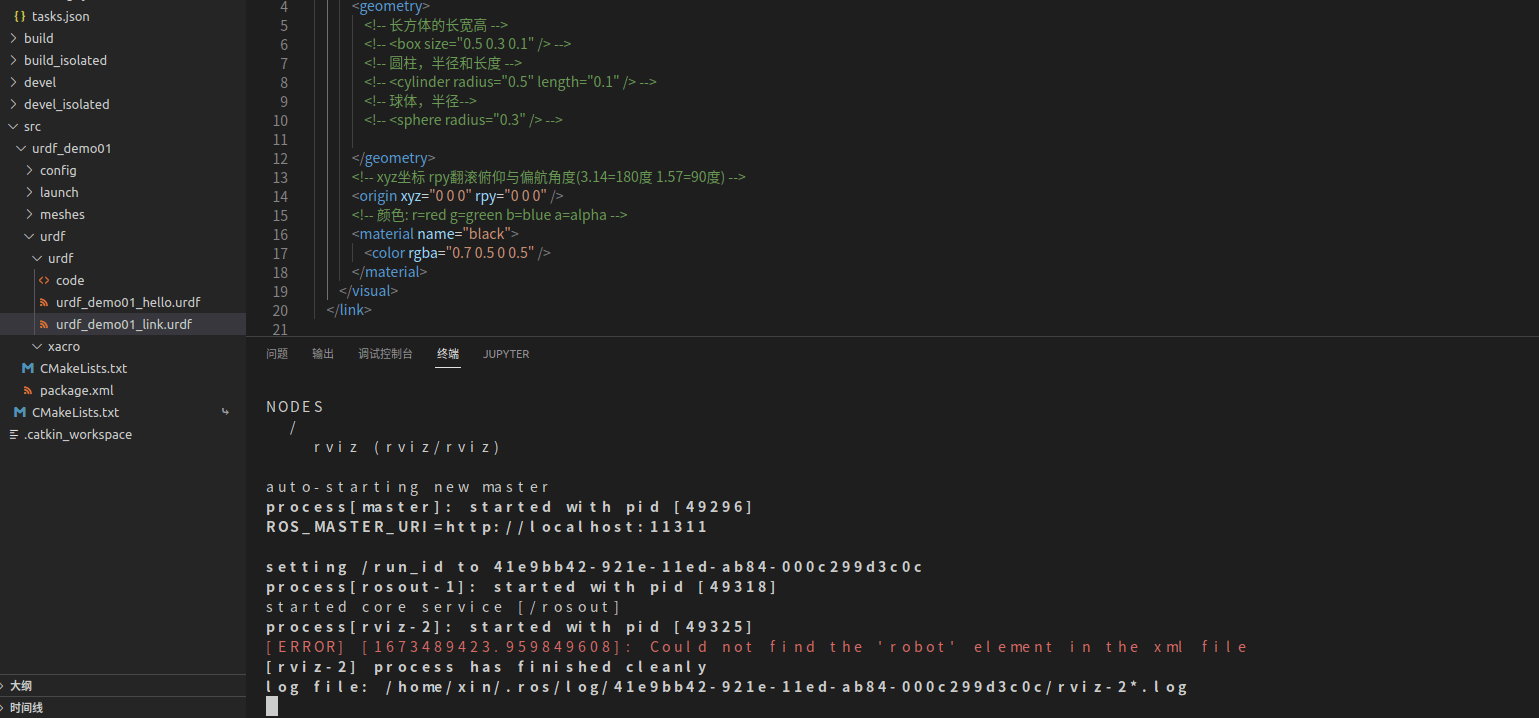
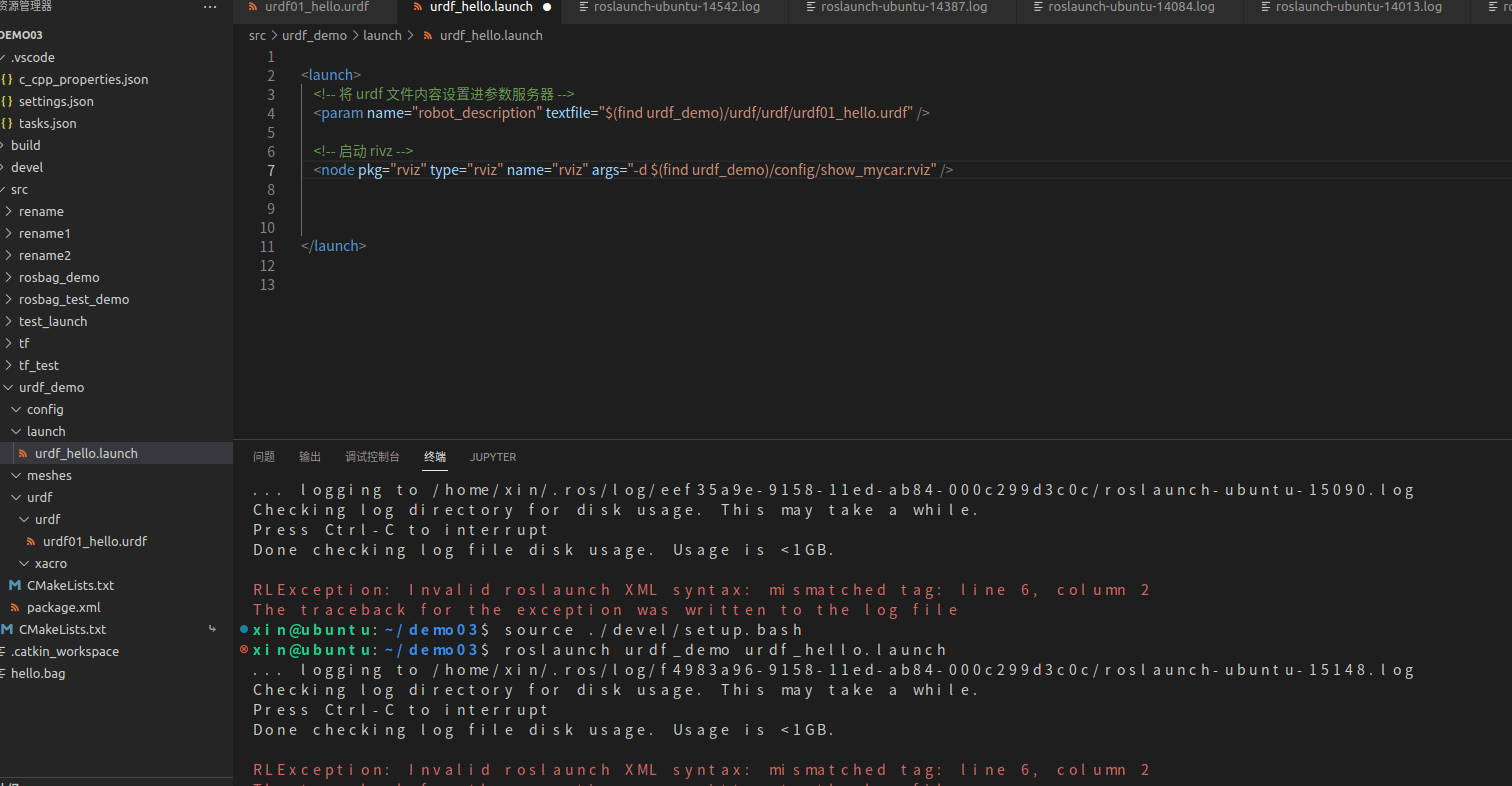
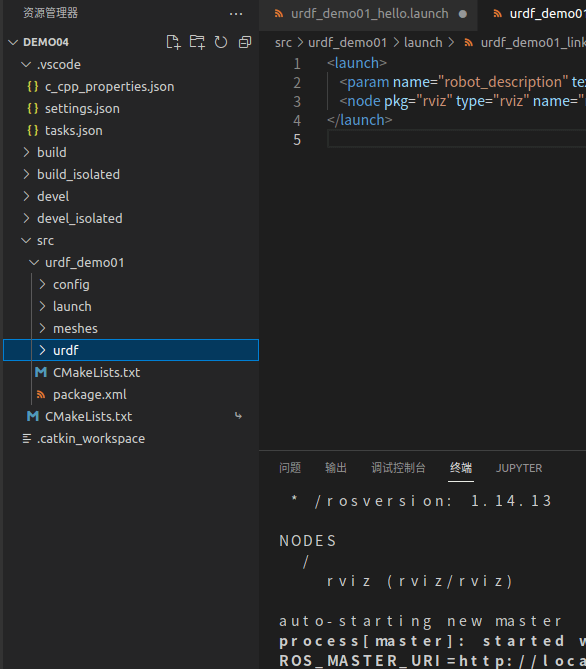
需求 在 Rviz 中显示一个盒状机器人 实现流程 准备:新建功能包,导入依赖 核心:编写 urdf 文...