Loading...
基本流程 编写一个单独的 xacro 文件,为机器人模型添加雷达配置 文件集成进xacro文件 ...
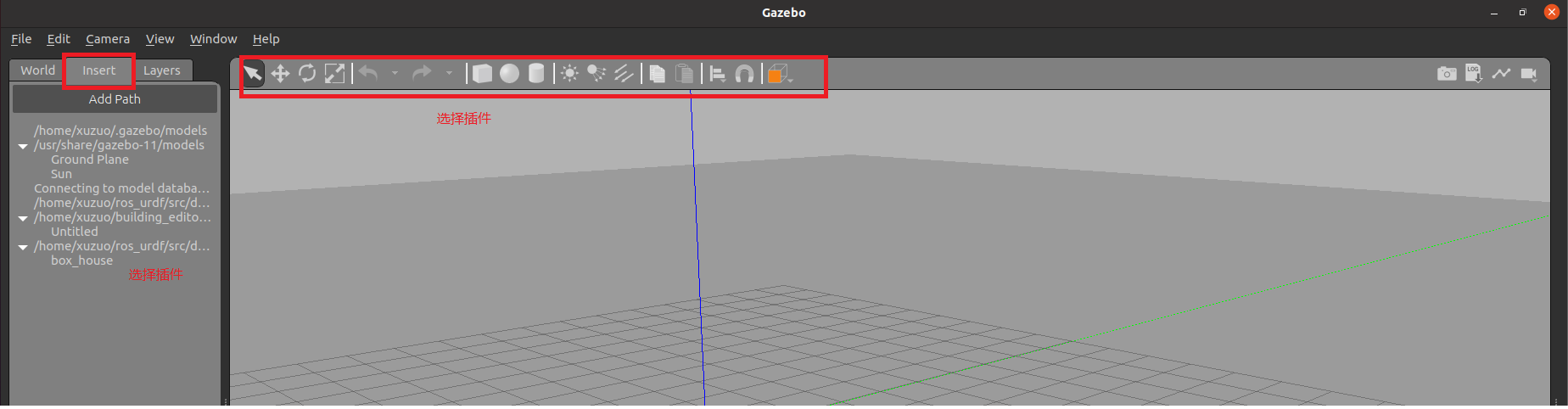
内置组件创建仿真环境 启动 Gazebo 并添加组件 ![请输入图片描述][1] 保存仿真环境 ...
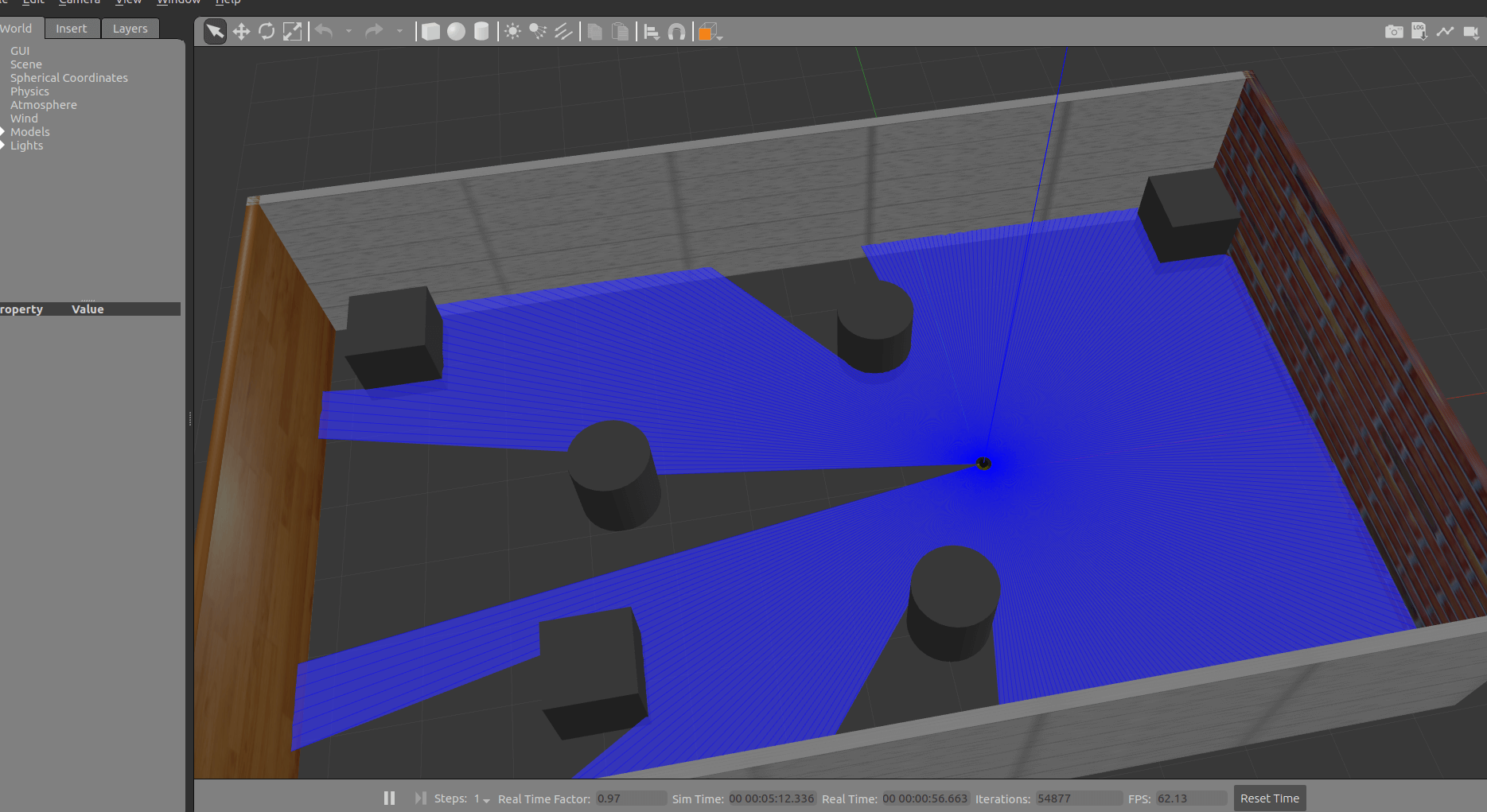
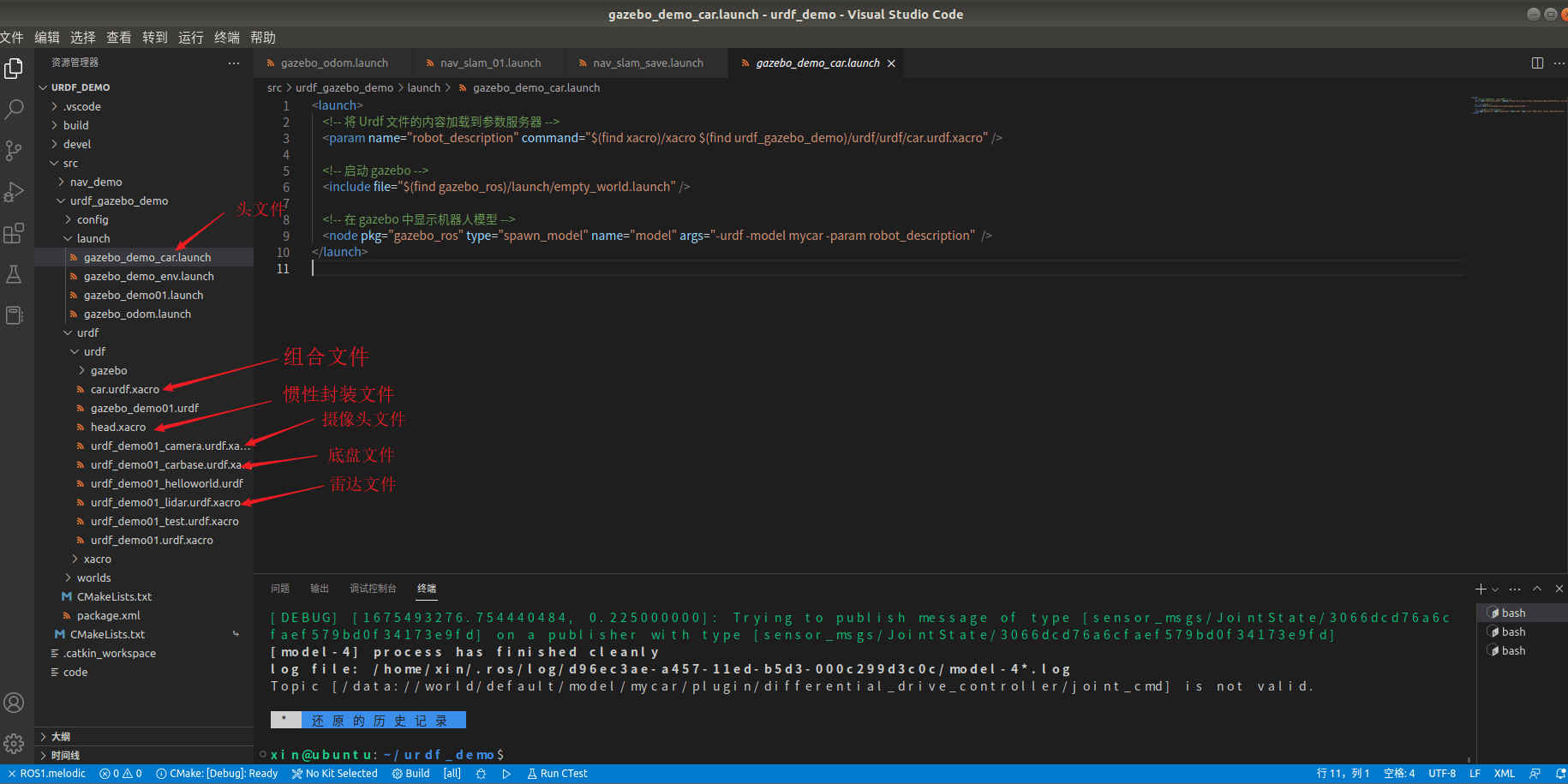
简介 将机器人模型(xacro版)显示在 gazebo 中 实现流程 编写封装惯性矩阵算法的 xacr...